Sprint 1

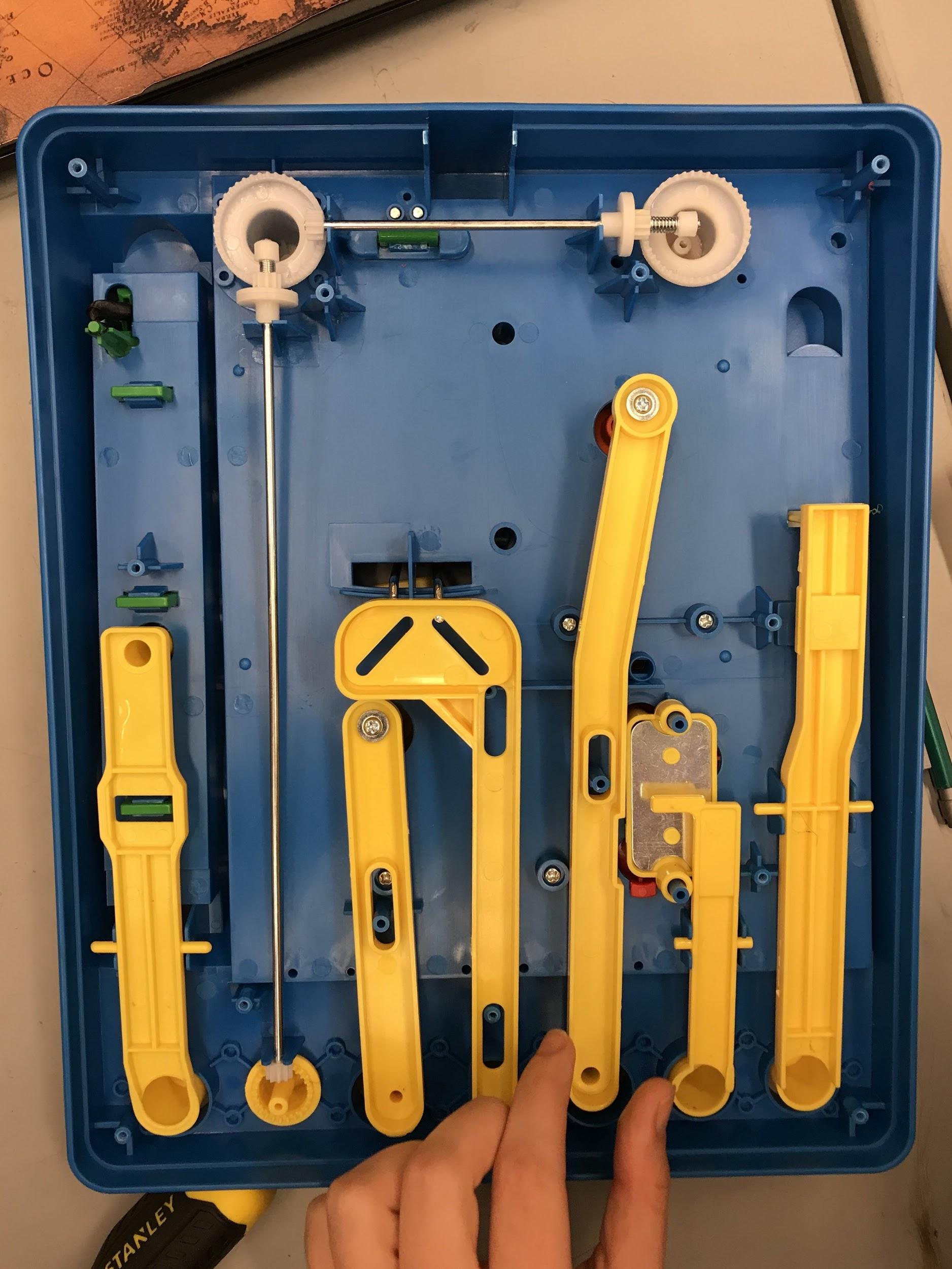
We began sprint 1 by playing the original Screwball Scramble to get a sense of the mechanics of the game. We then took the game apart to look at the inner workings. After that experience, we were able to generate a list of obstacles that we wanted to see in our mechatronics version of Screwball Scramble. From the list, we chose eight obstacles that we wanted to see in our final game and planned out a game board around those eight obstacles.


The Game Thus Far
Minimum viable game
A two-player cooperative with with four obstacles per player.
Objective
Two players must work together to get the ball to the end of the obstacle course
Scoring
Either a race to complete the course as fast as possible, or a set time limit with the goal of getting as many balls through as possible.
Obstacles Built
Uncovered tilt maze
Theme
Unknown
Name
Unknown
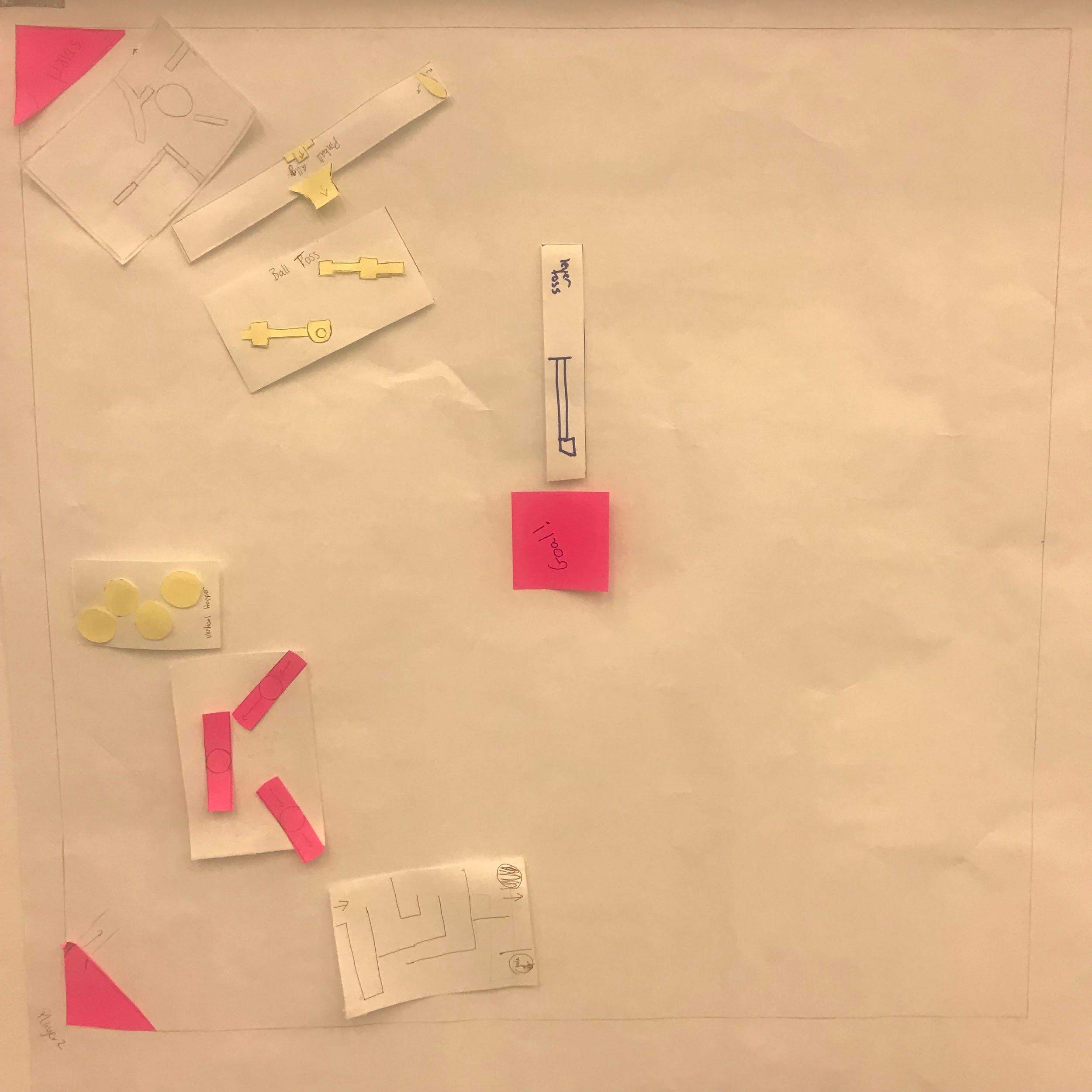
Concept Map
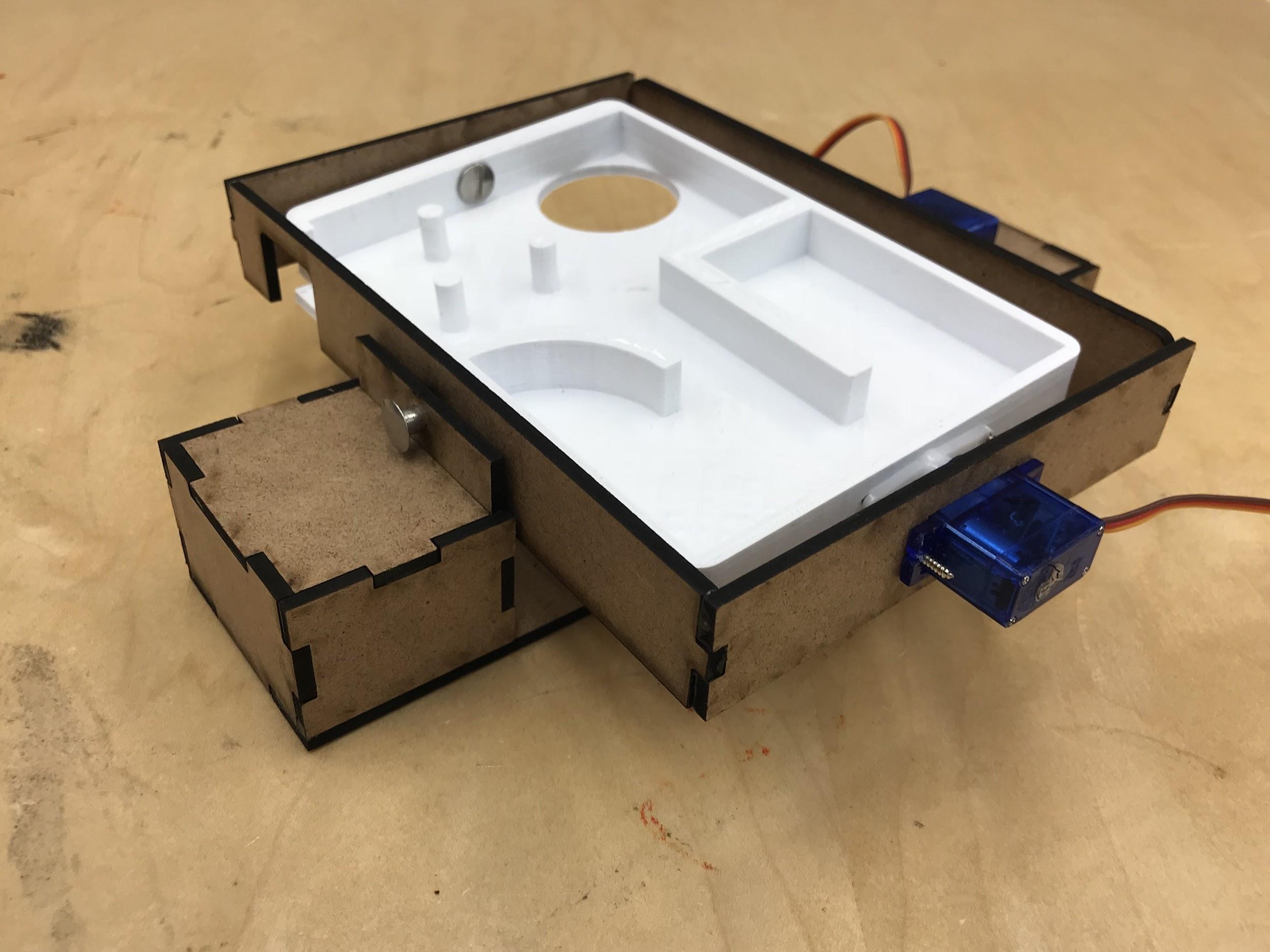
The Tilt Maze
The biggest accomplishment of sprint 1 was the tilt maze. We designed, fabricated, programed, and tested the tilt maze in this sprint. The tilt maze consists of two servos that each control one tilt axis. The player has to navigate through the tilt maze using a joystick without falling into the hole.
Lessons Learned
- Integration required careful planning
- Keep mechanisms as simple as possible
- Servos are fragile and will break if you stall them
- Electronics take a while to get to Olin
Team Bonding
During this sprint we also went to Fun and Games in Natick, Massachusetts to play arcade games and bond as a team. We earned enough tickets from an hour of playing games to buy a team mascot named Screwball Paul.

